
Cánh tay robot 4 servo (DIY) ( Tự lắp)
Thương hiệu: OEM | Xem thêm Thiết Bị Robot OEM Xem thêm Thiết Bị Robot bán bởi TTQ shopMô tả ngắn
Miễn phí vận chuyển với đơn hàng lớn hơn 1.000.000 đGiao hàng ngay sau khi đặt hàng (áp dụng với TP. HCM)Đổi trả trong 3 ngày, thủ tục đơn giảnNhà cung cấp xuất hóa đơn cho sản phẩm này...




Sản phẩm tương tự




Giới thiệu Cánh tay robot 4 servo (DIY) ( Tự lắp)

Miễn phí vận chuyển với đơn hàng lớn hơn 1.000.000 đ

Giao hàng ngay sau khi đặt hàng (áp dụng với TP. HCM)

Đổi trả trong 3 ngày, thủ tục đơn giản

Nhà cung cấp xuất hóa đơn cho sản phẩm này
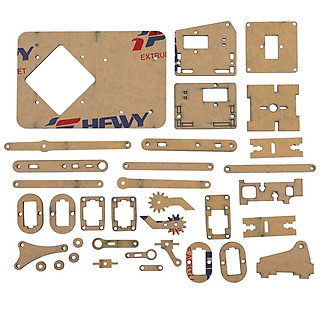
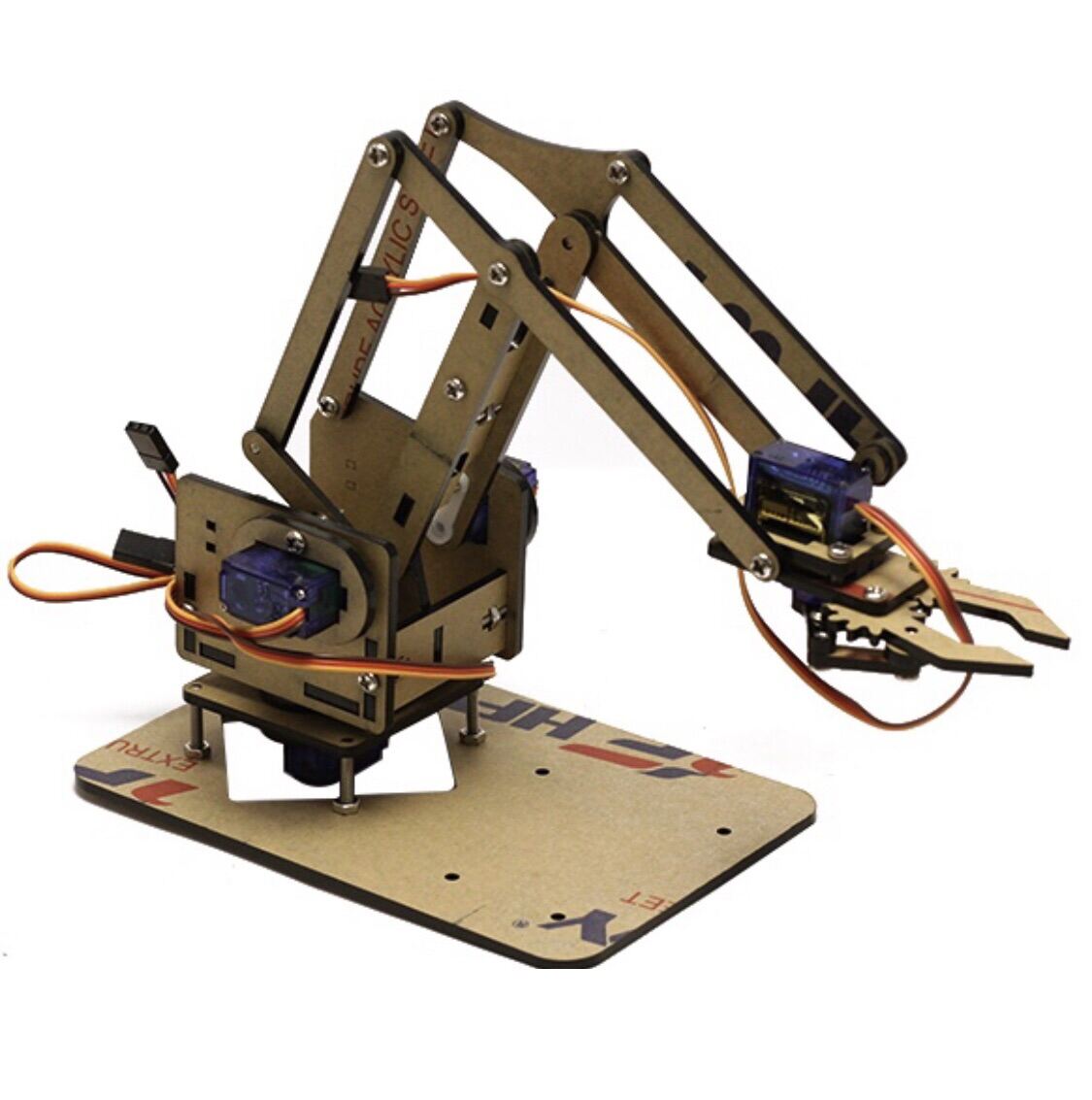
Bộ khung cánh tay robot 4 servo là bộ KIT cánh tay robot được cắt cnc. Bộ cánh tay robot sử dụng động cơ servo SG90 nhỏ gọn và hiệu dụng. Được sử dụng cho học tập và giảng dạy.
Thông số kỹ thuật:
- Ốc + vít dử dụng cho lắp ghép
- Sử dụng 4 servo SG90 để lắp ráp hoàn thiện
Hướng dẫn chi tiết lắp ráp:
Hướng dẫn sử dụng tham khảo:
Sử dụng 2 joystick đơn kết nối với arduino uno để điều khiển 4 servo.
- Sau khi lắp ráp sản phẩm như hình tiến hành kết nối: cấp nguồn ngoài cho 4 servo, nhớ kết nối chung mass với arduino.
- Cấp nguồn cho joystick trực tiếp từ nguồn 5V arduino, chân tín hiệu của joystick và servo được kết nối với arduino.
————————————CODE THAM KHẢO—————————————
#include Servo myservo1; Servo myservo2; Servo myservo3; Servo myservo4; int pos1=90, pos2=60, pos3=90, pos4=45; const int right_X = A2; const int right_Y = A5; const int right_key = 7; const int left_X = A3; const int left_Y = A4; const int left_key = 8; int x1,y1,z1; int x2,y2,z2; void setup() { // boot posture myservo1.write(pos1); delay(1000); myservo2.write(pos2); myservo3.write(pos3); myservo4.write(pos4); delay(1500); pinMode(right_key, INPUT); pinMode(left_key, INPUT); Serial.begin(9600); } void loop() { myservo1.attach(A1); myservo2.attach(A0); myservo3.attach(6); myservo4.attach(9); x1 = analogRead(right_X); y1 = analogRead(right_Y); z1 = digitalRead(right_key); x2 = analogRead(left_X); y2 = analogRead(left_Y); z2 = digitalRead(left_key); // kẹp zhuazi(); // xoay zhuandong(); // servo trái xiaobi(); // servo phải dabi(); } //kẹp void zhuazi() { //claw if(x2<300) { pos4=pos4-2; myservo4.write(pos4); delay(5); if(pos4<45) { pos4=45; } } if(x2>800) { pos4=pos4+8; myservo4.write(pos4); delay(5); if(pos4>90) { pos4=90; } } } //****************************************************** // xoay void zhuandong() { if(x1<300) { pos1=pos1-1; myservo1.write(pos1); delay(5); if(pos1<1) { pos1=0; } } if(x1>800) { pos1=pos1+1; myservo1.write(pos1); delay(5); if(pos1>180) { pos1=180; } } } //**********************************************************/ //servo trái void xiaobi() { if(y1>800) { pos2=pos2-1; myservo2.write(pos2); delay(5); if(pos2<15) { pos2=15; } } if(y1<300) { pos2=pos2+1; myservo2.write(pos2); delay(5); if(pos2>120) { pos2=120; } } } //*************************************************************/ // servo phải void dabi() { if(y2<300) { pos3=pos3+1; myservo3.write(pos3); delay(5); if(pos3>140) { pos3=140; } } if(y2>800) { pos3=pos3-1; myservo3.write(pos3); delay(5); if(pos3<30) { pos3=30; } } }
Chi Tiết Sản Phẩm
| Thương hiệu | OEM |
|---|---|
| Xuất xứ thương hiệu | Trung Quốc |
| Xuất xứ | Trung Quốc |
| Sản phẩm có được bảo hành không? | Không |
| SKU | t199572670 |
| d | 4514 |





